
 产品:14
产品:14
 联系我们
联系我们

在大批量生产中, 为了缩短装夹工件的辅助时间, 往往采用装夹时间与产品加工时间重合的双工位夹具。因此, 如何设计出一种气压传动的双工位夹具,是许多夹具设计人员经常面临的问题。下面就来介绍一种双工位气动夹具,
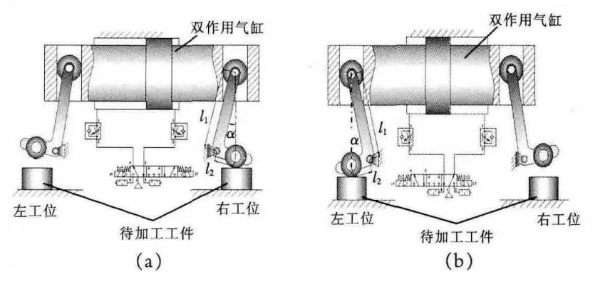
图1 夹具原理图
是夹具的工作原理图,其设计创意在于气缸活塞杆输出两端滚柱铰链采用对称设计,铰链连接 L形杠杆的设计实现夹紧力的放大。阀芯处于图(a)所示左位状态,压缩空气进入气缸左气腔,推动气缸活塞向右运动;右工位活塞杆则通过右边的滚柱铰链杠杆增力机构,对右工位的工件进行夹紧。此时左工位活塞杆拉动增力机构,使得左工位松开进行装卸。

在工业自动化生产的年代里面,机器人真空吸盘得到了,关注它所带来的真空吸盘也是一个**的气动元件,它的吸附性很强,各方面表现不错,实用实在,推动工业领域发展。
机器人真空吸盘可以通过一定的真空度很好的维持两个物体的吸附能力,在工业上面,经常会使用机器人真空吸盘来轻松实现迁移和搬运过程中的拿和放,自动化和机械化也比较强,机器人真空吸盘可以帮助人工在很大程度上面节省体力,完成人力所不能完成的任务。